Disturbed system augments the nominal system so that all the CT interfaces and dimensions are satisfied. What is done is basically augmenting the state with the assumed disturbance with specified dimensionality.
More...
|
| | DisturbedSystem () |
| | Constructor. More...
|
| |
| virtual | ~DisturbedSystem ()=default |
| |
| | DisturbedSystem (std::shared_ptr< ct::core::Controller< STATE_DIM, CONTROL_DIM, SCALAR >> controller) |
| | Copy constructor. More...
|
| |
| void | setController (const std::shared_ptr< ct::core::Controller< STATE_DIM, CONTROL_DIM, SCALAR >> controller) |
| |
| virtual void | computeControlledDynamics (const ct::core::StateVector< AUGMENTED_DIM, SCALAR > &state, const SCALAR &t, const ct::core::ControlVector< CONTROL_DIM, SCALAR > &control, ct::core::StateVector< AUGMENTED_DIM, SCALAR > &derivative)=0 |
| | Implementation of the base computeControlledDynamics method. More...
|
| |
| | ControlledSystem (const SYSTEM_TYPE &type=SYSTEM_TYPE::GENERAL) |
| |
| | ControlledSystem (std::shared_ptr< ct::core::Controller< STATE_DIM+DIST_DIM, CONTROL_DIM, SCALAR >> controller, const SYSTEM_TYPE &type=SYSTEM_TYPE::GENERAL) |
| |
| | ControlledSystem (const ControlledSystem &arg) |
| |
| virtual | ~ControlledSystem () |
| |
| virtual ControlledSystem< STATE_DIM+DIST_DIM, CONTROL_DIM, SCALAR > * | clone () const override=0 |
| |
| void | setController (const std::shared_ptr< Controller< STATE_DIM+DIST_DIM, CONTROL_DIM, SCALAR >> &controller) |
| |
| void | getController (std::shared_ptr< Controller< STATE_DIM+DIST_DIM, CONTROL_DIM, SCALAR >> &controller) const |
| |
| std::shared_ptr< Controller< STATE_DIM+DIST_DIM, CONTROL_DIM, SCALAR > > | getController () |
| |
| virtual void | computeDynamics (const StateVector< STATE_DIM+DIST_DIM, SCALAR > &state, const time_t &t, StateVector< STATE_DIM+DIST_DIM, SCALAR > &derivative) override |
| |
| virtual void | computeControlledDynamics (const StateVector< STATE_DIM+DIST_DIM, SCALAR > &state, const time_t &t, const ControlVector< CONTROL_DIM, SCALAR > &control, StateVector< STATE_DIM+DIST_DIM, SCALAR > &derivative)=0 |
| |
| ControlVector< CONTROL_DIM, SCALAR > | getLastControlAction () |
| |
| | System (const SYSTEM_TYPE &type=SYSTEM_TYPE::GENERAL) |
| |
| | System (const System &other) |
| |
| virtual | ~System () |
| |
| virtual void | computeDynamics (const StateVector< STATE_DIM, SCALAR > &state, const time_t &t, StateVector< STATE_DIM, SCALAR > &derivative)=0 |
| |
| SYSTEM_TYPE | getType () const |
| |
| virtual bool | isSymplectic () const |
| |
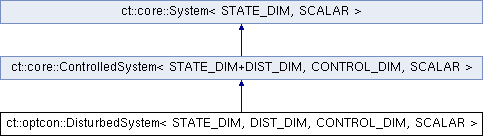
template<size_t STATE_DIM, size_t DIST_DIM, size_t CONTROL_DIM, typename SCALAR = double>
class ct::optcon::DisturbedSystem< STATE_DIM, DIST_DIM, CONTROL_DIM, SCALAR >
Disturbed system augments the nominal system so that all the CT interfaces and dimensions are satisfied. What is done is basically augmenting the state with the assumed disturbance with specified dimensionality.
- Template Parameters
-
| STATE_DIM | nominal state dimensionality |
| DIST_DIM | dimensionality of the disturbance |
| CONTROL_DIM | |
 Public Member Functions inherited from ct::core::ControlledSystem< STATE_DIM+DIST_DIM, CONTROL_DIM, SCALAR >
Public Member Functions inherited from ct::core::ControlledSystem< STATE_DIM+DIST_DIM, CONTROL_DIM, SCALAR > 1.8.13
1.8.13