#include <LinkedMasses.h>
|
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | LinkedMasses2 () |
| |
| LinkedMasses2 * | clone () const override |
| |
| void | computeControlledDynamics (const ct::core::StateVector< state_dim > &state, const double &t, const ct::core::ControlVector< control_dim > &control, ct::core::StateVector< state_dim > &derivative) override |
| |
| | ControlledSystem (const SYSTEM_TYPE &type=SYSTEM_TYPE::GENERAL) |
| |
| | ControlledSystem (std::shared_ptr< ct::core::Controller< 8, 3, SCALAR >> controller, const SYSTEM_TYPE &type=SYSTEM_TYPE::GENERAL) |
| |
| | ControlledSystem (const ControlledSystem &arg) |
| |
| virtual | ~ControlledSystem () |
| |
| void | setController (const std::shared_ptr< Controller< 8, 3, SCALAR >> &controller) |
| |
| void | getController (std::shared_ptr< Controller< 8, 3, SCALAR >> &controller) const |
| |
| std::shared_ptr< Controller< 8, 3, SCALAR > > | getController () |
| |
| virtual void | computeDynamics (const StateVector< 8, SCALAR > &state, const time_t &t, StateVector< 8, SCALAR > &derivative) override |
| |
| virtual void | computeControlledDynamics (const StateVector< 8, SCALAR > &state, const time_t &t, const ControlVector< 3, SCALAR > &control, StateVector< 8, SCALAR > &derivative)=0 |
| |
| ControlVector< 3, SCALAR > | getLastControlAction () |
| |
| | System (const SYSTEM_TYPE &type=SYSTEM_TYPE::GENERAL) |
| |
| | System (const System &other) |
| |
| virtual | ~System () |
| |
| virtual void | computeDynamics (const StateVector< STATE_DIM, SCALAR > &state, const time_t &t, StateVector< STATE_DIM, SCALAR > &derivative)=0 |
| |
| SYSTEM_TYPE | getType () const |
| |
| virtual bool | isSymplectic () const |
| |
◆ LinkedMasses2()
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW LinkedMasses2::LinkedMasses2 |
( |
| ) |
|
|
inline |
◆ clone()
◆ computeControlledDynamics()
◆ state_dim
| const int LinkedMasses2::state_dim = 8 |
|
static |
◆ control_dim
| const int LinkedMasses2::control_dim = 3 |
|
static |
The documentation for this class was generated from the following file:
- /home/gim2rng/ct_devel_ws/src/control-toolbox/ct_optcon/test/testSystems/LinkedMasses.h
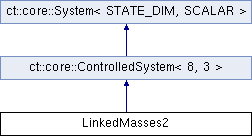
 Public Member Functions inherited from ct::core::ControlledSystem< 8, 3 >
Public Member Functions inherited from ct::core::ControlledSystem< 8, 3 > 1.8.13
1.8.13