|
| | MIMOIntegrator () |
| |
| void | computeControlledDynamics (const core::StateVector< state_dim > &state, const core::Time &t, const core::ControlVector< control_dim > &control, core::StateVector< state_dim > &derivative) override |
| |
| MIMOIntegrator * | clone () const override |
| |
| | ControlledSystem (const SYSTEM_TYPE &type=SYSTEM_TYPE::GENERAL) |
| |
| | ControlledSystem (std::shared_ptr< ct::core::Controller< state_dim, control_dim, SCALAR >> controller, const SYSTEM_TYPE &type=SYSTEM_TYPE::GENERAL) |
| |
| | ControlledSystem (const ControlledSystem &arg) |
| |
| virtual | ~ControlledSystem () |
| |
| void | setController (const std::shared_ptr< Controller< state_dim, control_dim, SCALAR >> &controller) |
| |
| void | getController (std::shared_ptr< Controller< state_dim, control_dim, SCALAR >> &controller) const |
| |
| std::shared_ptr< Controller< state_dim, control_dim, SCALAR > > | getController () |
| |
| virtual void | computeDynamics (const StateVector< state_dim, SCALAR > &state, const time_t &t, StateVector< state_dim, SCALAR > &derivative) override |
| |
| virtual void | computeControlledDynamics (const StateVector< state_dim, SCALAR > &state, const time_t &t, const ControlVector< control_dim, SCALAR > &control, StateVector< state_dim, SCALAR > &derivative)=0 |
| |
| ControlVector< control_dim, SCALAR > | getLastControlAction () |
| |
| | System (const SYSTEM_TYPE &type=SYSTEM_TYPE::GENERAL) |
| |
| | System (const System &other) |
| |
| virtual | ~System () |
| |
| virtual void | computeDynamics (const StateVector< STATE_DIM, SCALAR > &state, const time_t &t, StateVector< STATE_DIM, SCALAR > &derivative)=0 |
| |
| SYSTEM_TYPE | getType () const |
| |
| virtual bool | isSymplectic () const |
| |
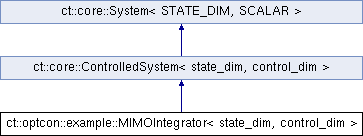
template<size_t state_dim, size_t control_dim>
class ct::optcon::example::MIMOIntegrator< state_dim, control_dim >
Dynamics class for the GNMS unit test.
 Public Types inherited from ct::core::ControlledSystem< state_dim, control_dim >
Public Types inherited from ct::core::ControlledSystem< state_dim, control_dim > 1.8.13
1.8.13