|
- 3.0.2 optimal control module.
|
|
- 3.0.2 optimal control module.
|
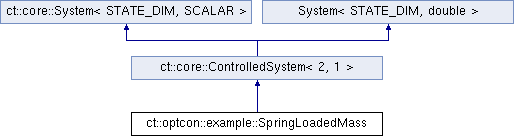
Dynamics class for the GNMS unit test. More...
#include <SpringLoadedMass.h>
Public Member Functions | |
| SpringLoadedMass () | |
| void | computeControlledDynamics (const core::StateVector< state_dim > &state, const core::Time &t, const core::ControlVector< control_dim > &control, core::StateVector< state_dim > &derivative) override |
| SpringLoadedMass * | clone () const override |
 Public Member Functions inherited from ct::core::ControlledSystem< 2, 1 > Public Member Functions inherited from ct::core::ControlledSystem< 2, 1 > | |
| ControlledSystem (const SYSTEM_TYPE &type=SYSTEM_TYPE::GENERAL) | |
| ControlledSystem (std::shared_ptr< ct::core::Controller< 2, 1, SCALAR >> controller, const SYSTEM_TYPE &type=SYSTEM_TYPE::GENERAL) | |
| ControlledSystem (const ControlledSystem &arg) | |
| virtual | ~ControlledSystem () |
| void | setController (const std::shared_ptr< Controller< 2, 1, SCALAR >> &controller) |
| void | getController (std::shared_ptr< Controller< 2, 1, SCALAR >> &controller) const |
| std::shared_ptr< Controller< 2, 1, SCALAR > > | getController () |
| virtual void | computeDynamics (const StateVector< 2, SCALAR > &state, const time_t &t, StateVector< 2, SCALAR > &derivative) override |
| virtual void | computeControlledDynamics (const StateVector< 2, SCALAR > &state, const time_t &t, const ControlVector< 1, SCALAR > &control, StateVector< 2, SCALAR > &derivative)=0 |
| ControlVector< 1, SCALAR > | getLastControlAction () |
| Public Member Functions inherited from ct::core::System< STATE_DIM, SCALAR > | |
| System (const SYSTEM_TYPE &type=SYSTEM_TYPE::GENERAL) | |
| System (const System &other) | |
| virtual | ~System () |
| virtual void | computeDynamics (const StateVector< STATE_DIM, SCALAR > &state, const time_t &t, StateVector< STATE_DIM, SCALAR > &derivative)=0 |
| SYSTEM_TYPE | getType () const |
| virtual bool | isSymplectic () const |
| Public Member Functions inherited from System< STATE_DIM, double > | |
| System (const SYSTEM_TYPE &type=SYSTEM_TYPE::GENERAL) | |
| System (const System &other) | |
| virtual | ~System () |
| virtual void | computeDynamics (const StateVector< STATE_DIM, double > &state, const time_t &t, StateVector< STATE_DIM, double > &derivative)=0 |
| SYSTEM_TYPE | getType () const |
| virtual bool | isSymplectic () const |
Static Public Attributes | |
| static const size_t | state_dim = 2 |
| static const size_t | control_dim = 1 |
| static constexpr double | kStiffness = 10 |
Additional Inherited Members | |
| Public Types inherited from ct::core::ControlledSystem< 2, 1 > | |
| typedef std::shared_ptr< ControlledSystem< 2, 1, SCALAR > > | Ptr |
| typedef Base::time_t | time_t |
| Public Types inherited from ct::core::System< STATE_DIM, SCALAR > | |
| typedef SCALAR | time_t |
| Public Types inherited from System< STATE_DIM, double > | |
| typedef double | time_t |
| Public Attributes inherited from ct::core::ControlledSystem< 2, 1 > | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW typedef System< 2, SCALAR > | Base |
| Public Attributes inherited from ct::core::System< STATE_DIM, SCALAR > | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW typedef SCALAR | S |
| Public Attributes inherited from System< STATE_DIM, double > | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW typedef double | S |
| Protected Attributes inherited from ct::core::ControlledSystem< 2, 1 > | |
| std::shared_ptr< Controller< 2, 1, SCALAR > > | controller_ |
| ControlVector< 1, SCALAR > | controlAction_ |
| Protected Attributes inherited from ct::core::System< STATE_DIM, SCALAR > | |
| SYSTEM_TYPE | type_ |
| Protected Attributes inherited from System< STATE_DIM, double > | |
| SYSTEM_TYPE | type_ |
Dynamics class for the GNMS unit test.
|
inline |
References SECOND_ORDER.
Referenced by clone().
|
inlineoverride |
References kStiffness.
|
inlineoverridevirtual |
Implements ct::core::ControlledSystem< 2, 1 >.
References SpringLoadedMass().
|
static |
|
static |
|
static |
 1.8.13
1.8.13