|
- 3.0.2 optimal control module.
|
|
- 3.0.2 optimal control module.
|
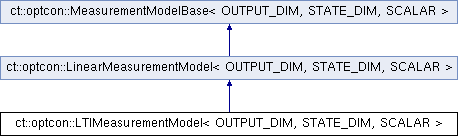
Linear Time-Invariant measurement model is simply a linear measurement model for which the matrix C is constant in time. More...
#include <LTIMeasurementModel.h>
Public Member Functions | |
| LTIMeasurementModel () | |
| Default constructor. More... | |
| LTIMeasurementModel (const output_state_matrix_t &C, const output_matrix_t &dHdw=output_matrix_t::Zero()) | |
| Constructor. More... | |
| output_vector_t | computeMeasurement (const state_vector_t &state, const Time_t &t=0) override |
| Calculates the measurement from the current state. More... | |
| output_state_matrix_t | computeDerivativeState (const state_vector_t &state, const Time_t &t) override |
| Returns matrix C. More... | |
| output_matrix_t | computeDerivativeNoise (const state_vector_t &state, const Time_t &t) override |
| Returns the constant dHdw. More... | |
 Public Member Functions inherited from ct::optcon::MeasurementModelBase< OUTPUT_DIM, STATE_DIM, SCALAR > Public Member Functions inherited from ct::optcon::MeasurementModelBase< OUTPUT_DIM, STATE_DIM, SCALAR > | |
| virtual | ~MeasurementModelBase () |
| virtual ct::core::OutputVector< OUTPUT_DIM, SCALAR > | computeMeasurement (const ct::core::StateVector< STATE_DIM, SCALAR > &state, const ct::core::Time &t=0)=0 |
Protected Attributes | |
| output_state_matrix_t | dHdx_ |
| output_matrix_t | dHdw_ |
| Matrix C. More... | |
Linear Time-Invariant measurement model is simply a linear measurement model for which the matrix C is constant in time.
| STATE_DIM | nominal state dimensionality |
| DIST_DIM | dimensionality of the disturbance |
| CONTROL_DIM |
| using ct::optcon::LTIMeasurementModel< OUTPUT_DIM, STATE_DIM, SCALAR >::Base = LinearMeasurementModel<OUTPUT_DIM, STATE_DIM, SCALAR> |
| using ct::optcon::LinearMeasurementModel< OUTPUT_DIM, STATE_DIM, SCALAR >::output_matrix_t = ct::core::OutputMatrix<OUTPUT_DIM, SCALAR> |
| using ct::optcon::LinearMeasurementModel< OUTPUT_DIM, STATE_DIM, SCALAR >::output_state_matrix_t = ct::core::OutputStateMatrix<OUTPUT_DIM, STATE_DIM, SCALAR> |
| using ct::optcon::MeasurementModelBase< OUTPUT_DIM, STATE_DIM, SCALAR >::output_vector_t = ct::core::OutputVector<OUTPUT_DIM, SCALAR> |
| using ct::optcon::MeasurementModelBase< OUTPUT_DIM, STATE_DIM, SCALAR >::state_vector_t = ct::core::StateVector<STATE_DIM, SCALAR> |
| using ct::optcon::MeasurementModelBase< OUTPUT_DIM, STATE_DIM, SCALAR >::Time_t = ct::core::Time |
| ct::optcon::LTIMeasurementModel< OUTPUT_DIM, STATE_DIM, SCALAR >::LTIMeasurementModel | ( | ) |
Default constructor.
| ct::optcon::LTIMeasurementModel< OUTPUT_DIM, STATE_DIM, SCALAR >::LTIMeasurementModel | ( | const output_state_matrix_t & | C, |
| const output_matrix_t & | dHdw = output_matrix_t::Zero() |
||
| ) |
Constructor.
|
overridevirtual |
Calculates the measurement from the current state.
Implements ct::optcon::LinearMeasurementModel< OUTPUT_DIM, STATE_DIM, SCALAR >.
|
overridevirtual |
Returns matrix C.
Implements ct::optcon::LinearMeasurementModel< OUTPUT_DIM, STATE_DIM, SCALAR >.
|
overridevirtual |
Returns the constant dHdw.
Implements ct::optcon::LinearMeasurementModel< OUTPUT_DIM, STATE_DIM, SCALAR >.
|
protected |
|
protected |
Matrix C.
 1.8.13
1.8.13